Mecánica FI2001
Sólido rígido
Cuando hablamos de sólidos rígidos hablamos de dos posibles tipos de cuerpos: continuos o discretos. Ambos se tratan de forma muy similar, lo único que difieren es en la forma en la que se calcula el momentum angular $\vec{L}$.
Blah blah.
Habiendo mencionado esto, en esta unidad usaremos 2 fórmulas principales: la relación torque-momentum angular
\begin{equation}\label{eq:formula-maestra1} \frac{{\rm d}}{{\rm d}t}\vec{L}^{\rm tot}_{\mathcal{O}} = \vec{\tau}^{\rm tot, ext}_{\mathcal{O}} \end{equation}y una variación de la segunda Ley de Newton
\begin{equation}\label{eq:formula-maestra2} M_{\rm tot}\vec{R}_{\rm CM} = \sum_i \vec{F}^{\rm ext}_i. \end{equation}Para resolver los problemas de esta unidad ocuparemos estas 2 fórmulas y los siguientes pasos:
- Primer paso: Identificar las fuerzas actuando sobre el sólido
- Segundo paso: Elegir (inteligentemente) un sistema de coordenadas adecuado
- Tercero paso: Calcular el torque de las fuerzas externas
- Cuarto paso: Calcular el momentum angular
- Quinto paso: Reemplazar en \eqref{eq:formula-maestra1}
- Sexto paso: (De ser necesario) calcular \eqref{eq:formula-maestra2}
Para aterrizar algunos de estos pasos, veremos el siguiente Ejemplo:
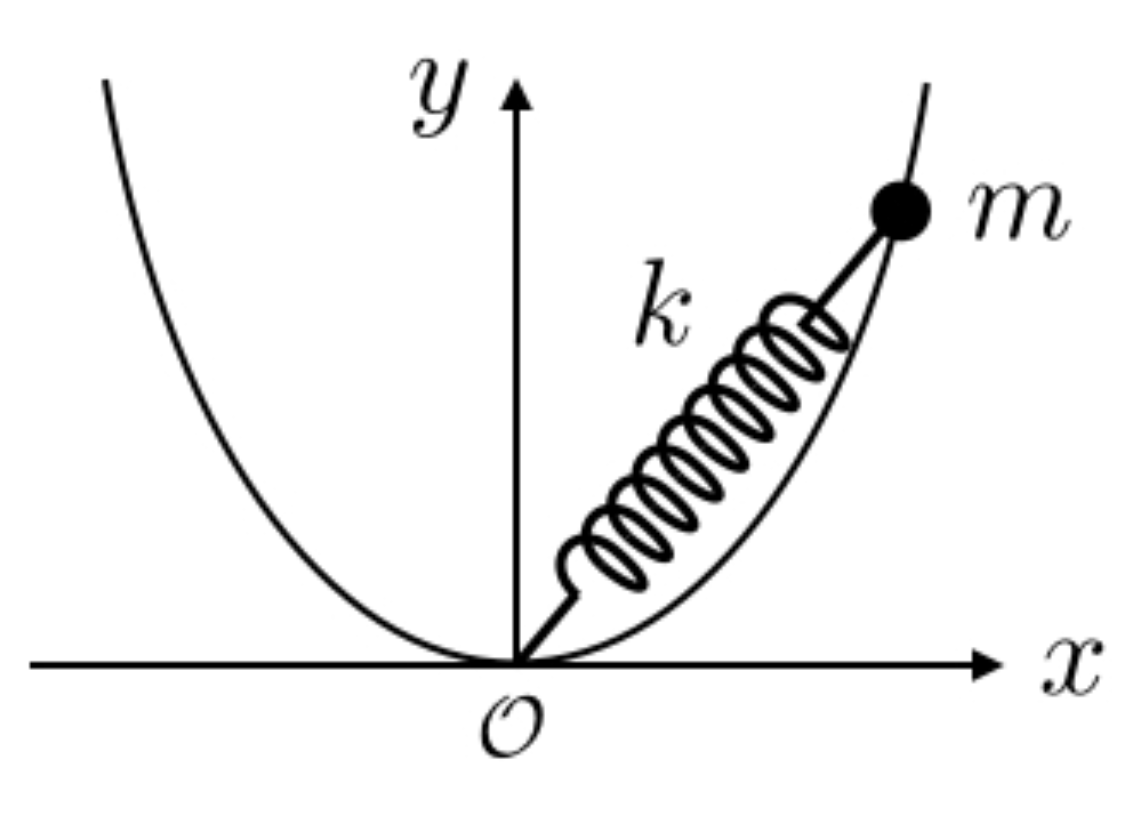
Donde un anillo de masa $m$ puede deslizar sin roce por un alambre con forma dada por $y=x^2/x_0$. El anillo está unido a un resorte ideal de constante $k$, largo natural 0 ($l_0=0$), y sujeto al punto $\mathcal{O}$. Además de la fuerza del resorte $\vec{F}_R$ y de la fuerza ejercida por el alambre $\vec{F}_A$, sobre el anillo acúa una fuerza externa
\begin{equation*} \vec{F}_E=\frac{k}{x_0}\left(xy\hat{i}+\frac{3x_0}{4}y\hat{j}\right)\,. \end{equation*}En construcción...

- Clasificación de fuerzas
El super índice ext en \eqref{eq:formula-maestra1} y \eqref{eq:formula-maestra2} hace mención que esas cantidades están calculadas considerando únicamente fuerzas externas. Como dice su nombre, estas son fuerzas que vienen desde fuera de nuestro sistema de masas continuas o discretas, por ejemplo: la fuerza peso, fuerzas de roce, normales, alguien tocando una de las masas, etc.
El otro conjunto de fuerzas son las internas, que son las fuerzas que permiten mantener la forma del sistema. Comunmente estas fuerzas son ejercidas por varas y cuerdas que mantienen la distancia entre dos o más partículas. De cualquier forma, estas fuerzas no aparecen en nuestras fórmulas y podemos simplemente olvidarnos de ellas.
Una vez habiendo clasificado las fuerzas del problema, debemos identificar en qué punto del sólido rígido están actuando y en qué dirección. Basta con imaginárselo o hacer un bosquejo, lo que nos ayudará en el siguiente paso.
- Sistema fijo al sólido
Este punto es muy relevante. Para calcular $\vec{L}_{\mathcal{O}}^{\rm tot}$ y $\vec{\tau}_{\mathcal{O}}^{\rm tot,ext}$ necesitamos definir un sistema de coordenadas cartesiano, solidario con el movimiento del sólido y cuyo origen es $\mathcal{O}$.
Para definir este origen $\mathcal{O}$, lo primero que debemos hacer es fijarnos si existe un pivote físico en torno al cuál gira el cuerpo. Por ejemplo, un clavo puesto en uno de los extremos de una barra que une 2 masas. Esta elección hace que cuando calculemos el torque producido por las fuerzas externas, las fuerzas producidas por el pivote tengan un torque nulo.
De no existir este pivote físico existen 2 posibilidades: 1. Simplemente definir $\mathcal{O}$ en el centro de masa (CM) del sólido rígido, 2. Fijarlo en algún punto fijo del espacio, en torno al cual el cuerpo giraría.
- Muy típico en problemas donde el cuerpo es una esfera/disco/cilindro que está rodando sin resbalar sobre alguna superficie
- Cuando el cuerpo se mueve siguiendo alguna circunferencia. Les recomiendo checkear la P3 Examen 2023
Habiendo elegido adecuadamente el origen $\mathcal{O}$, hay que definir los ejes del sistema cartesiano, $\{\hat{x}',\hat{y}',\hat{z}'\}$. Estos vectores van a ser solidarios con el movimiento del cuerpo, o sea, van a estar pegados a este en todo momento, rotando y trasladándose junto al sólido rígido (por eso la notación $'$).
- Calcular torques
Hay que definir las fuerzas externas (recuerden que nos olvidamos de las internas) en la base $\{\hat{x}',\hat{y}',\hat{z}'\}$ y calcular su torque correspondiente ocupando la fórmula
\begin{equation*} \vec{\tau} = \vec{r}\times\vec{F}, \end{equation*}donde $\vec{r}$ es el brazo de palanca, un vector medido desde $\mathcal{O}$ hasta la posición donde se ejerce la fuerza $\vec{F}$.
Esto hay que hacerlo para todas las fuerzas que ejerzan torque, y luego se suman todas las contribuciones para dar el torque total externo,
\begin{equation*} \vec{\tau}^{\rm tot,ext}_{\mathcal{O}} = \sum_i \vec{\tau}^{\rm ext}_{\mathcal{O},i}. \end{equation*}Si eligieron correctamente sus sistema de coordenadas, posiblemente varias fuerzas tendrán torque nulo o sus expresiones serán bastante simples. Lo más usual es que, en un inicio, se defina $\hat{z}'$ apuntando perpendicular al movimiento del cuerpo, y es por esto que lo usual es que el torque finalmente quede únicamente en al dirección de $\pm\hat{z}'$. Lo mismo sucederá con el momentum angular $\vec{L}$.
- Momentum angular
Si estamos tratando con masas discretas, lo más simple es calcular las contribuciones discretas $\vec{L}_i$ del momentum angular con la fórmula
\begin{equation*} \vec{L}_i = m_i\vec{r}_i\times\vec{v}_i \end{equation*}donde $m_i$ es la masa de la partícula $i$-ésima, $\vec{r}_i$ su posición, y $\vec{v}_i$ su velocidad. Primero uno expresa $\vec{r}_i$ en el sistema elegido y luego simplemente se deriva con respecto al tiempo para obtener $\vec{v}_i$. Finalmente, se suman todas las contribuciones
\begin{equation*} \vec{L}^{\rm tot}_{\mathcal{O}} = \sum_i \vec{L}_i \end{equation*}