Mecánica FI2001
Sistemas de Referencia No Inercial
El nombre Sistema de Referencia No Inercial, o SRNI, viene de que hay problemas físicos en los cuales el movimiento de una partícula, aparentemente muy complicado en un sistema fijo en el espacio, es muy fácil de describir en un sistema de referencia que es solidario al movimiento de esta. Este movimiento solidario puede considerar que el sistema de referencia está rotando o trasladándose aceleradamente, por lo que lo llamamos no inercial.
Además, como estamos hablando de un sistema acelerado, a priori, las derivadas temporales de los vectores no es la usual, por ejemplo: $\dot{\hat{\rho}}\neq \rho\dot{\phi}\hat{\phi}$. Sin embargo, jugando un poco con la matemática, se puede llegar a la siguiente fórmula maestra, donde las derivadas sí funcionan de la manera que ya conocemos:
Aviso que, aunque parezca una fórmula algo larga, varios términos se hacen $0$ dependiendo del caso.
Para resolver los problemas de esta unidad ocuparemos la fórmula maestra y los siguientes pasos:
- Primer paso: Definir el sistema de referencia no inercial $S'$ y la posición $\vec{r'}$
- Segundo paso: Definir el sistema inercial $S$ y calcular $\vec{R}$
- Tercero paso: Definir la velocidad angular $\vec{\Omega}$
- Cuarto paso: Calcular las fuerzas reales $\vec{F}_i$
- Quinto paso: Pasar todos los vectores de $S$ al sistema $S'$
- Sexto paso: Calcular los términos de la fórmula maestra \eqref{eq:formula-maestra}
- Séptimo paso: Calcular lo que nos pidan en el enunciado
Y para aterrizar estos pasos, veremos el siguiente Ejemplo:
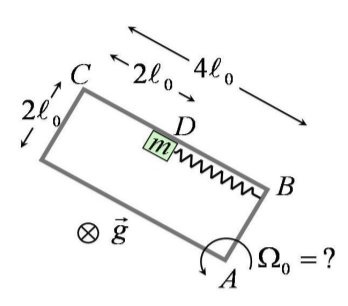
Considere una caja de base rectangular (lados $2l_0$ y $4l_0$) que rota con velocidad angular constante, desconocida, respecto de un eje vertical que pasa por su vértice $A$ como muestra la figura. Por el interior de la caja, una partícula de masa $m$ está ligada al vértice $B$ , mediante un resorte ideal de constante elástica $k$ y largo natural $l_0$. Se desprecia cualquier roce.
- Calcule la velocidad angular de la caja $\Omega_0$ tal que la partícula tenga un punto de equilibrio estable en el punto $D$ (ver figura), además determine el periodo de pequeñas oscilaciones con respecto a este punto.
- Considere el valor de $\Omega_0$ que acaba de calcular y que la masa es soltada desde el reposo (relativo a la caja que gira) en el vértice $C$, calcule a que distancia de $B$ la masa se separa de la pared $BC$.
- Elementos de la fórmula
Primero, empecemos definiendo los 4 objetos que componen la fórmula
- $\vec{r}\,'$: Vector posición definido en el sistema de referencia no inercial (SRNI) $S'$, que va desde el origen de $S'$ hasta la posición de la partícula.
- $\vec{F}_i$: $i$-ésima fuerza real actuando sobre la partícula
- $\vec{R}$: Vector posición definido en el sistema de referencia inercial (SRI) $S$, que va desde el origen de $S$ hasta el origen de $S'$
- $\vec{\Omega}$: Velocidad angular con la que rota un sistema de coordenadas cartesiano definido en $S'$ con respecto a un sistema cartesiano definido en $S$
- $S'$ y $\vec{r}\,'$
En este primer paso debemos definir nuestro SRNI, que llamaremos $S'$, o sea, elegir su origen y el sistema de coordenadas que utilizaremos: cartesiano, cilíndrico o esférico.
Para esto debemos pensar en un sistema $S'$ donde sea fácil describir el movimiento de la partícula. Por ejemplo, buscamos que en este sistema la partícula se mueva siguiendo un círculo o una línea recta. Se darán cuenta que para lograr esto, comunmente $S'$ debe seguir las rotaciones y traslaciones del problema.
En el Ejemplo que estamos tratando, podemos ver que hay dos movimientos "independientes": la rotación de la caja y el movimiento de la partícula a lo largo de una de una arista de la caja.
En este caso, resulta natural definir $S'$ como un sistema que se mueve solidario/junto a la caja, ya que la partícula con respecto a la caja se mueve simplemente en línea recta. También, resulta útil definir el origen de este sistema en el vértice $B$ y, como el movimiento es lineal, que sea un sistema de coordenadas cartesiano.
Ahora, el vector posición $\vec{r}\,'$, que va desde $\mathcal{O}'$ (el origen de $S'$) hasta la posición de la partícula, sería:
\begin{equation*} \vec{r}\,' = x'\hat{x}' \end{equation*}y como las derivadas temporales funcionan de la manera usual, serían:
\begin{equation*} \dot{\vec{r}}\,' = \dot{x}'\hat{x}',\quad \ddot{\vec{r}}\,' = \ddot{x}'\hat{x}' \end{equation*}- Calcular $\vec{R}$
Para definir $\vec{R}$ primero hay que definir un Sistema de Referencia Inercial (SRI) fijo en en el espacio, que llameremos $S$. Para esto, por un momento nos olvidamos de la partícula y nos enfocamos únicamente en el origen de $S'$. Tenemos que pensar como si $\mathcal{O}'$ fuera una partícula y queremos definir su movimiento según el sistema $S$.
En el Ejemplo, notamos que $\mathcal{O}'$ gira circularmente alrededor del vértice $A$, por lo que resulta natural definir el origen de $S$ en $A$ y utilizar un sistema de coordenadas cilíndrico con $\hat{\rho}$ apuntando a $B$.
Con todo esto, como $\vec{R}$ es un vector que va desde $\mathcal{O}$ a $\mathcal{O}'$, en este caso sería:
\begin{equation*} \vec{R} = L\hat{\rho} \end{equation*}y sus derivadas serían
\begin{equation*} \dot{\vec{R}} = R\dot{\phi}\hat{\phi},\quad \ddot{\vec{R}} = -R\dot{\phi}^2\hat{\rho} + R\ddot{\phi}\hat{\phi} . \end{equation*}- Definir la velocidad angular $\vec{\Omega}$
Este vector nos dice cómo está girando $S'$ con respecto a $S$, en la mayoría de los casos definido en las coordenadas de $S$.
Tenemos que pensar que definimos un sistema cartesiano solidario a $S'$ y otro solidario a $S$ (aunque no los ocupemos en otros pasos), solaparlos y describir cómo está girando uno con respecto al otro. Hay que definir tanto la magnitud de la velocidad del giro, que usualmente es la que sale en el enunciado o en la figura, como la dirección del giro. Para este último paso, recuerden que la dirección de la velocidad angular se define con la regla de la mano derecha.
En nuestro ejemplo notamos que la velocidad angular es:
\begin{equation*} \vec{\Omega} = \Omega_0\hat{k}, \end{equation*}donde $\hat{k}$ es un vector del sistema $S$. Adicionalmente, como $\Omega_0$ es constante por enunciado, se tiene que
\begin{equation*} \dot{\vec{\Omega}} = \vec{0}. \end{equation*}- Fuerzas reales
La mayoría de los términos de la fórmula maestra son fuerzas conocidas como ficticias, que se deben al movimiento no inercial de $S'$. Sin embargo, siguen habiendo fuerzas reales actuando sobre la partícula, por ejemplo, podrían estar actuando fuerzas como: la gravedad, fuerzas de contacto (normal), fuerza elástica, etc.
Estas son las mismas fuerzas con las que hemos tratado en unidades previas y se definen de la misma forma. Lo único distinto es que, en una primera instancia y dependiendo de lo que convenga, algunas fuerzas quedarán definidas según el sistema de $S$ y otras según $S'$, pero luego unificaremos todo.
En el Ejemplo que estamos tratando, notamos que tenemos:
- Fuerza elástica: $\vec{F}_e = -k(x' - l_0)\hat{x}'$
- Fuerza normal: $\vec{N} = N\hat{y}'$
Mientras que la fuerza peso se cancela exactamente con la normal que ejerce la base de la caja, en la dirección de $\hat{k}$, así que la ignoramos.
- Un único sistema
Hasta este punto, seguramente tendrán varias fuerzas o vectores definidos con las coordenadas de $S$ y otros varios con las coordenadas de $S'$, por lo que resulta necesario pasar todo a un único sistema. Lo normal es pasar de $S$ a $S'$, o sea, los vectores unitarios que definen el sistema $S$, escribirlos en función de los vectores unitarios de $S'$.
En este paso es bien común tener que usar trigonometría para hacer la descomposición de un vector. Debemos formar triángulos rectángulos donde la hipotenusa es el vector que queremos descomponer y los catetos vendrían siendo las descomposiciones en el otro sistema.
En el caso del problema que estamos resolviendo, es bastante sencillo, ya que gráficamente tenemos las siguientes relaciones:
- $\hat{\rho} = -\hat{y}'$
- $\hat{\phi} = \hat{x}'$
- $\hat{k} = \hat{k}'$
- Reemplazar en la fórmula maestra
Ya habiendo llegado a este paso, solo falta reemplazar en \eqref{eq:formula-maestra} todo lo que hemos calculado en los pasos anteriores. Importante ser muy ordenados en esta parte, ya que hay que hacer productos cruz y es fácil equivocarse de signos, pero más allá de eso no deberían haber complicaciones.
Terminado esto, lo que obtendrán es una expresión de $m\ddot{\vec{r}}\,'=\dotso$, lo que sería la ecuación de movimiento de la partícula en el sistema $S'$. Ecuación que podemos resolver igual que como lo hemos hecho en unidades anteriores, y calcular distintos aspectos del movimiento de la partícula.
En nuestro caso tendríamos:
de esta ecuación deben obtener las ecuaciones de movimiento escalares, igual que en segunda Ley de Newton.
- Calcular lo que nos piden
Ya habiendo completado el paso anterior, lo más difícil ya está hecho. Las preguntas específicas que se hacen en cada problema son muy similares a las que se hacen en unidades previas, por ejemplo:
- Indique en qué posición la partícula se encuentra en equilibrio
- Determine la distancia máxima que alcanza la partícula a lo largo de su movimiento
- Calcule la posición en que la partícula se despega de la pared
- Etc.
Seguramente van a tener que integrar las EoMs escalares, ocupando condiciones iniciales y trucos como despejar las incógnitas para obtener ecuaciones puramente dinámicas.
- Fuerzas ficticias
Por segunda Ley de Newton, $m\vec{a} = \vec{F}$, sabemos que la presencia de fuerzas afecta cómo se mueve una partícula, entonces, ¿por qué sucede que cuando vamos acelerando en un auto sentimos que hay una fuerzas que nos empuja hacia atrás si es que no hay nadie ni nada que realmente esté ejerciendo esa fuerza sobre nosotros?
Sucede que cuando nos movemos en un sistema de referencia no inercial, el movimiento acelerado de este produce que nuestro movimiento parezca como si estuviese siendo afectado por fuerzas adicionales, pero que realmente no están allí. Para visualizar esto, pueden ver el siguiente video:
Aquí podemos ver que, desde el marco de referencia de la sala, la pelota sigue una trayectoria recta, lo que tiene sentido ya que no hay fuerzas reales actuando sobre ella una vez que ya fue lanzada. Sin embargo, desde un marco de referencia solidario con la rotación del sistema o, lo que es lo mismo, desde la perspectiva de las dos personas, pareciese que hay una fuerza que produce que la trayectoria de la pelota sea curva.
Una aplicación más real de los SRNI es el efecto que la Fuerza de Coriolis tiene sobre el océano, y sus componentes relacionadas, en la Tierra. Esto lo pueden ver en el siguiente video:
En conclusión, la fórmula \eqref{eq:formula-maestra} no hace aparecer mágicamente nuevas fuerzas, sino que, más bien, es un truco matemático que nos permite analizar la dinámica de un cuerpo visto desde un sistema no inercial, como una persona parada en la Tierra que observa las corrientes del océano.
- Material Complementario
Si deseas profundizar más en este tópico o ver cómo se resuelven problemas concretos, te invito a revisar los siguientes enlaces:
- Auxiliares
- Evaluaciones
- Apunte Gonzalo